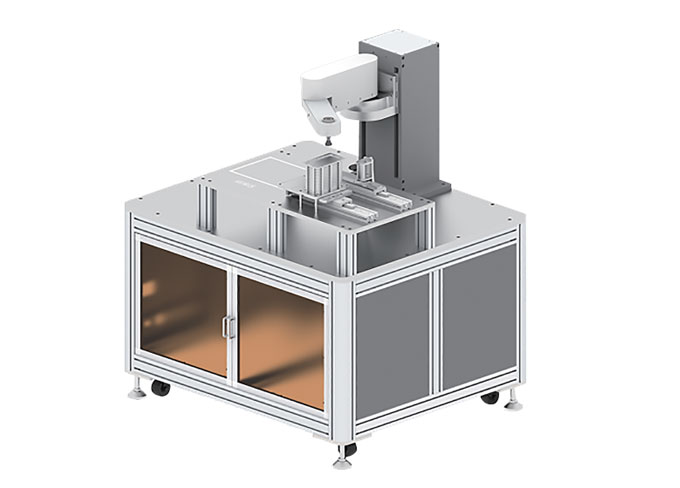
SCARAロボットには、回転関節が3つ、移動関節が1つあります。その回転関節軸線は互いに平行であり、平面内で位置決めと方向付けを行うことができる、ジョイントを移動して、平面に垂直なエンドピースの移動を完了します。手首の基準点の位置は、2回転関節の角度変位φ1とφ2、および移動関節の変位zによって決定される、すなわちp=f(φ1,φ2,z)。このようなロボットは構造が軽く、応答が速く、平面位置決めに適しており、垂直方向に組み立て作業を行うことができる。固高派動はSCARAロボットと速交換グリップを1つのワークステーションにまとめ、学生は基礎的なロボット操作を完了することができるほか、工業現場の先進的な自動化コンポーネント制御を把握することができる。

ウィーチャットQRコード
スマートフォン公式サイト





