产品分类:视觉跟踪机器人
日期:2023-09-11
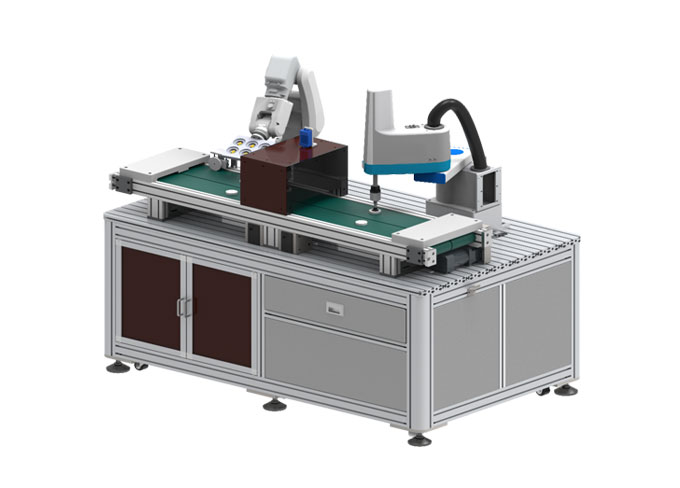
Scara机器人有3个旋转关节和1个移动关节。其旋转关节轴线相互平行,可以在平面内进行定位和定向;移动关节用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z)。这类机器人的结构轻便、响应快,适用于平面定位,垂直方向进行装配的作业。
四自由度Scara机器人视觉跟踪系
六自由度机器人视觉跟踪系统
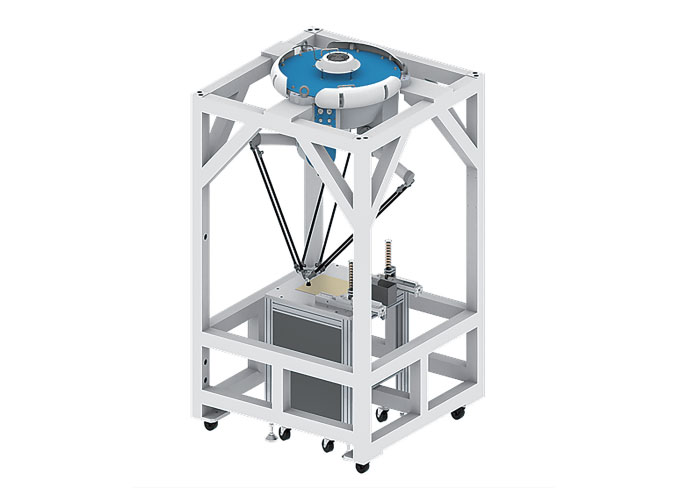
四自由度Delta机器人视觉跟踪系
如果您有任何的需要,请随时与我们联系